
University of Florida
DEPTH GLIDER RESEARCH

From Fall 2014-Fall 2015, I worked on camouflaging a glider from a depth sensor in Dr. Sanjeev J. Koppal’s FOCUS Lab.
I tested materials and determined which ones best confused the sensor by creating a model using MATLAB. It computational determines what materials optimize the stealth of the glider by examining over 300 depth map images. I also designed gliders and printed them using the Stratasys Object Connex2 which is capable of mixing material...

Rocket Team
I was a member of the rocket team since my sophomore year. We competed in the NASA student launch competition, where the goal was to launch a rocket a mile high and have a payload perform an experiment. I was the testing lead, and as a team we achieved the best altitude at competition. I was in charge of verifying each subsystem would function properly by designing and implementing tests, such as ejection charge tests to ensure recovery system would work, vacuum chamber tests to simulate change in altitude to test electronics.
For the 2016-2017 year, I was the president of the rocket team, I oversaw and helped with all designs, wrote various sections of the design reports, ran general body meetings, and ensured the team’s success. The payload was a camera that would have ejected at apogee, distinguish three 40 ft by 40 ft tarps, and land vertically on one of them. The initial design is shown below.



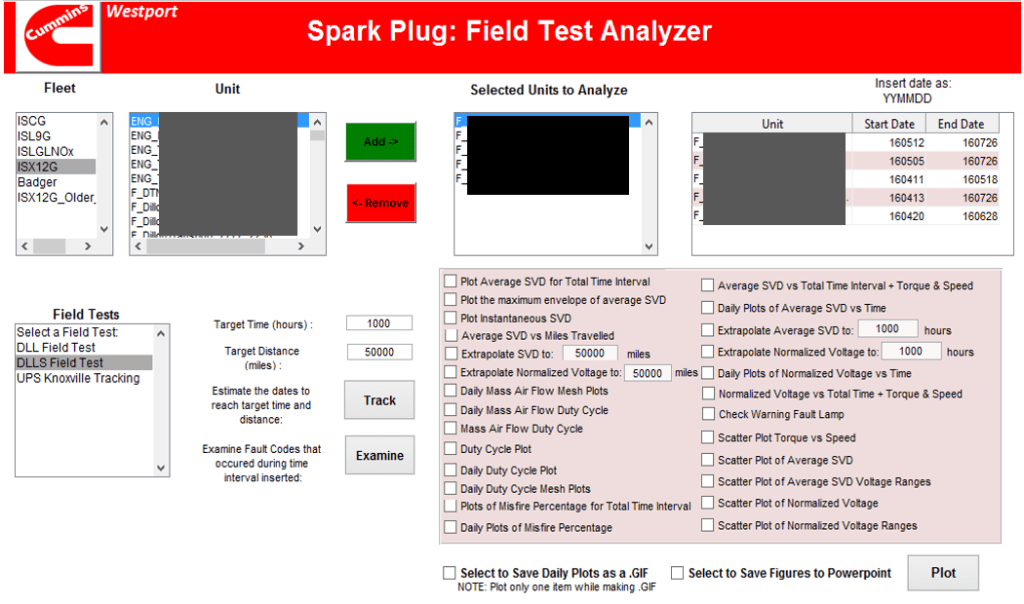
Cummins Internship
For summer 2016, I had the opportunity to be a spark ignition intern at Cummins. I developed a user interface data analyzer for Cummins’ natural gas engines, image of the tool is seen below. The tool I developed can analyze the field test data and make accurate predictions when the engine’s spark plugs should be replaced. This is beneficial for the customer and the environment in order to prevent engine misfires, which prevents unburned hydrocarbons from being released into the atmosphere, decreasing pollution. The tool is also capable of plotting various data relationships and it can run on MATLAB or it can be downloaded as a separate executable program.
Design, Manufacture, compete



As part of the design and manufacturing lab, teams of four had to design a remote controlled robot that was capable of collecting racquetballs at different heights and positions within an arena and drop them off in a bucket.
As a team we decided on our design using a design matrix , wrote several reports, and manufactured the system ourselves using a mill, lathe, and a CNC machine. Our robot came first in the period and tied for 10th overall.
