
Columbia University
Current standing rehabilitation strategies utilize passive rigid frames that does not actively engage the individuals’ lower extremities nor promote muscle activity.
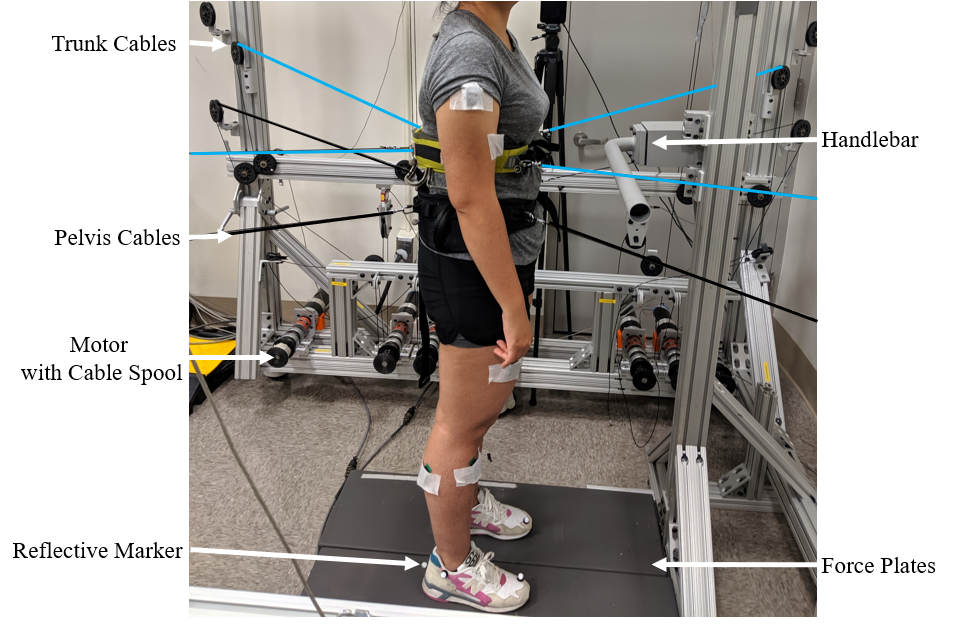
Using a Cable Driven Robot to Study Balance Control Strategies in Standing
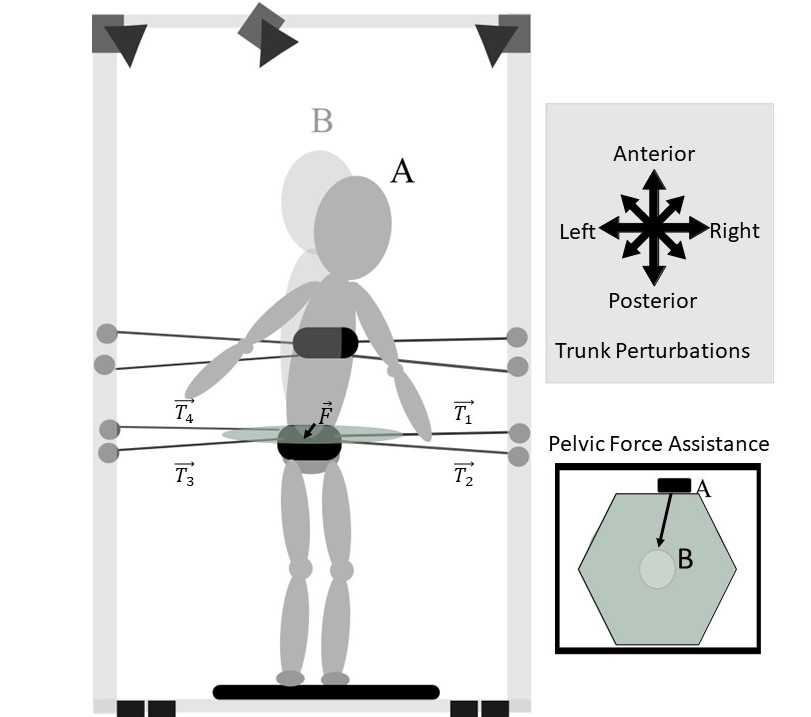
My goal has been to show how a cabled robot can actively promote muscle activity and natural standing reactions. I designed an assist-as-needed force controller and performed an experiment to show how abled-participants can:
- Achieve stability without augmenting their natural weight distribution
- Promote muscle activity
- Does not alter their postural response as compared to a traditional standing rehabilitation approach, using handrails for support.
Further detail of this work can be found via [Open Access Link].
The cable driven robot can improve standing in individuals with spinal cord injury
I created a force assistance that can be tailored to the individual’s stable workspace. With a combination of destabilizing and assistive forces, we showed how a six session training paradigm using the cable driven robot can improve standing balance in an individual with spinal cord injury (SCI). The SCI individual received destabilizing forces at the trunk in randomized directions. The individual had to regain stability and only received assistive forces at the pelvis if they went beyond their customized stable workspace. Further information can be found here.
My other research aims have been to create a robotic system that can be used to train, and assist sit to stand motion.
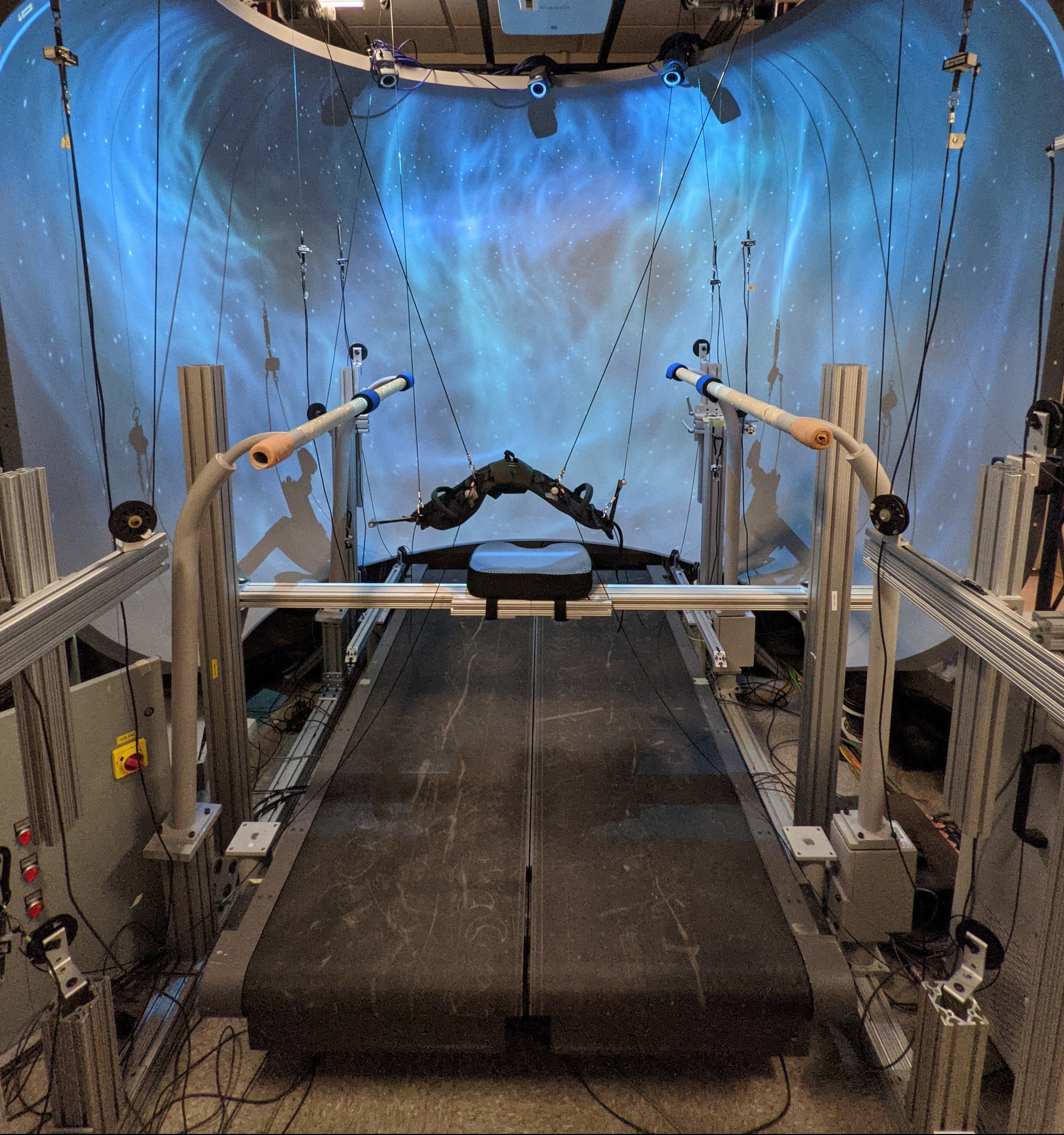
I have modified the cable driven robot to allow for dynamic motion like sit to stand. I also simulated and implemented a new controller to increase the solvable workspace and create a balance assessment tool. I have characterized how young adults react to different postural imbalances while standing up, you can read more about it here!
I am currently investigating how elders’ balance is affected using the robotic system. My goal is to show how this device can improve an individual’s sit-to-stand coordination.
My GitHub for sit-to-stand data analysis.
If you would like a copy of any of my publications, please feel free to contact me!
Publications
13. Enrico Rejc, Collin Bowersock, Tanvi Pisolkar, Isirame Omofuma, Tatiana Luna, Moiz Khan, Victor Santamaria, Beatrice Ugiliweneza, Claudia A Angeli, Gail F Forrest, Joel Stein, Sunil Agrawal, Susan J Harkema, “Robotic Postural Training With Epidural Stimulation for the Recovery of Upright Postural Control in Individuals With Motor Complete Spinal Cord Injury: A Pilot Study“, Neurotrauma Reports, 2024. [Link]
12. Collin D Bowersock, Tanvi Pisolkar, Isirame Omofuma, Tatiana Luna, Moiz Khan, Victor Santamaria, Joel Stein, Sunil Agrawal, Susan J Harkema, Enrico Rejc, “Robotic upright stand trainer (RobUST) and postural control in individuals with spinal cord injury”, The Journal of Spinal Cord Medicine, 2023. [Link]
11. Tatiana D. Luna, Victor Santamaria, Xupeng Ai, and Sunil K. Agrawal, “Reactive Postural Control During Sit-to-Stand Motion”, IEEE Robotics and Automation Letters, 2022 [Link] Presented at 9th IEEE BioRob Conference.
10. Tatiana D. Luna, Victor Santamaria, and Sunil K. Agrawal, “Redistributing Ground Reaction Forces During Squatting Using a Cable-Driven Robotic Device“, International Conference on Rehabilitation Robotics (ICORR), 2022. [Link] 3rd Place Student Award Paper
9. Collin Bowersock, Tanvi Pisolkar, Isirame Omofuma, Tatiana D. Luna, Moiz Khan, Victor Santamaria, Joel Stein, Sunil Agrawal, Susan J. Harkema & Enrico Rejc, “Robotic upright stand trainer (RobUST) and postural control in individuals with spinal cord injury”, The Journal of Spinal Cord Medicine, 2022. [Link]
8.Tatiana D. Luna, Victor Santamaria, Isirame Omofuma, Moiz I. Khan and Sunil K. Agrawal, “Postural Control Strategies in Standing With Handrail Support and Active Assistance From Robotic Upright Stand Trainer (RobUST),” in IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 29, pp. 1424-1431, 2021. [Open Access Link]
7. Victor Santamaria*, Tatiana D. Luna*, Sunil K. Agrawal, “Feasibility and tolerance of a robotic postural training to improve standing in a person with ambulatory spinal cord injury”, Spinal Cord Ser Cases 7, 104, 2021. [Link] *The authors contributed equally.
6. Haohan Zhang, Tatiana D. Luna, Lillian Yang, John Martin, & Sunil K. Agrawal, “RATS: A Robotic Arm Training System Designed for Rats“. Journal of Mechanisms and Robotics, 13(3), 031018, 2021. [Link]
5. Rand Hidayah, Tatiana Luna, Sunil K. Agrawal, “Cable-Driven Systems for Robotic Rehabilitation” Soft Robotics in Rehabilitation, Academic Press, Chapter 5, 2021. [Link]
4. Tatiana D. Luna, Victor Santamaria, Isirame Omofuma, Moiz I. Khan, Sunil K. Agrawal, “Control Mechanisms in Standing while Simultaneously Receiving Perturbations and Active Assistance from the Robotic Upright Stand Trainer (RobUST)“, IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), 2020. [Link]
3. Victor Santamaria, Tatiana D. Luna, Moiz Khan, Sunil K. Agrawal, “A Robotic Trunk-Support-Trainer (TruST) to Measure and Increase Postural Workspace during Sitting in People with Spinal Cord Injury”, Nature: Spinal Cord Series and Cases, 2020. [Link]
2. Victor Santamaria, Moiz Khan, Tatiana Luna, Jiyeon Kang, Joseph Dutkowsky, Andrew Gordon, Sunil Agrawal, “Promoting Functional and Independent Sitting in Children with Cerebral Palsy Using the Robotic Trunk Support Trainer“, IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2020. [Link]
1. Moiz I. Khan, Tatiana Luna, Victor Santamaria, Isirame Omofuma, Dario Martelli, Enrico Rejc, Joel Stein, Susan Harkema, and Sunil K. Agrawal, “Stand Trainer With Applied Forces at the Pelvis and Trunk: Response to Perturbations and Assist-As-Needed Support”, IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2019. [Link]
